The TRON 2 multi-modal embodied robot features one body with three configurations, integrating high-performance dual manipulator arms and all-terrain bipedal mobility. It serves as an all-scenario, all-terrain integrated development platform for VLA research, mobile manipulation, and full-body motion control.
Tron 2

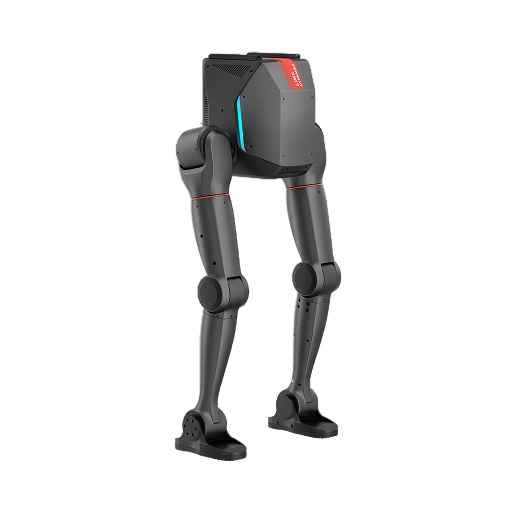
Tri-Form New Configuration
Dual Arms

Wheeled Legs
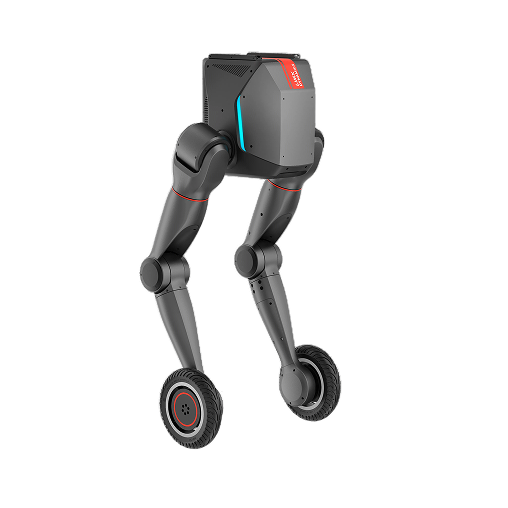
Sole
Everything in Sight, Fully in Control.
Featuring a 7-DoF robotic arm offering a 70cm reach—the largest workspace in its class—and a spherical human-like wrist design for agile wide range operations. The front camera covers the full arm span, ensuring complete visibility and precise control.

Freedom of Form, Flexible Combinations.
With its unique modular configuration, TRON 2 lets you freely configure Dual-arm, Bipedal, or Wheeled setups to fit your mission. Expandable with voice, vision, and more, it creates the ideal platform for building custom robotic solutions.
Superior Performance, Diverse Scenarios.
- 10kg Dual-Arm Payload: Master Desktop Tasks with Ease.
- Industry-Leading Motion Algorithms: Natural Postures, Balanced Control.
- 100ms Teleoperation Latency: “Seamless” Tele-Opt Experience, Following Your Lead.
All-Terrain Mobility Upgraded, Advancing Industry Applications.
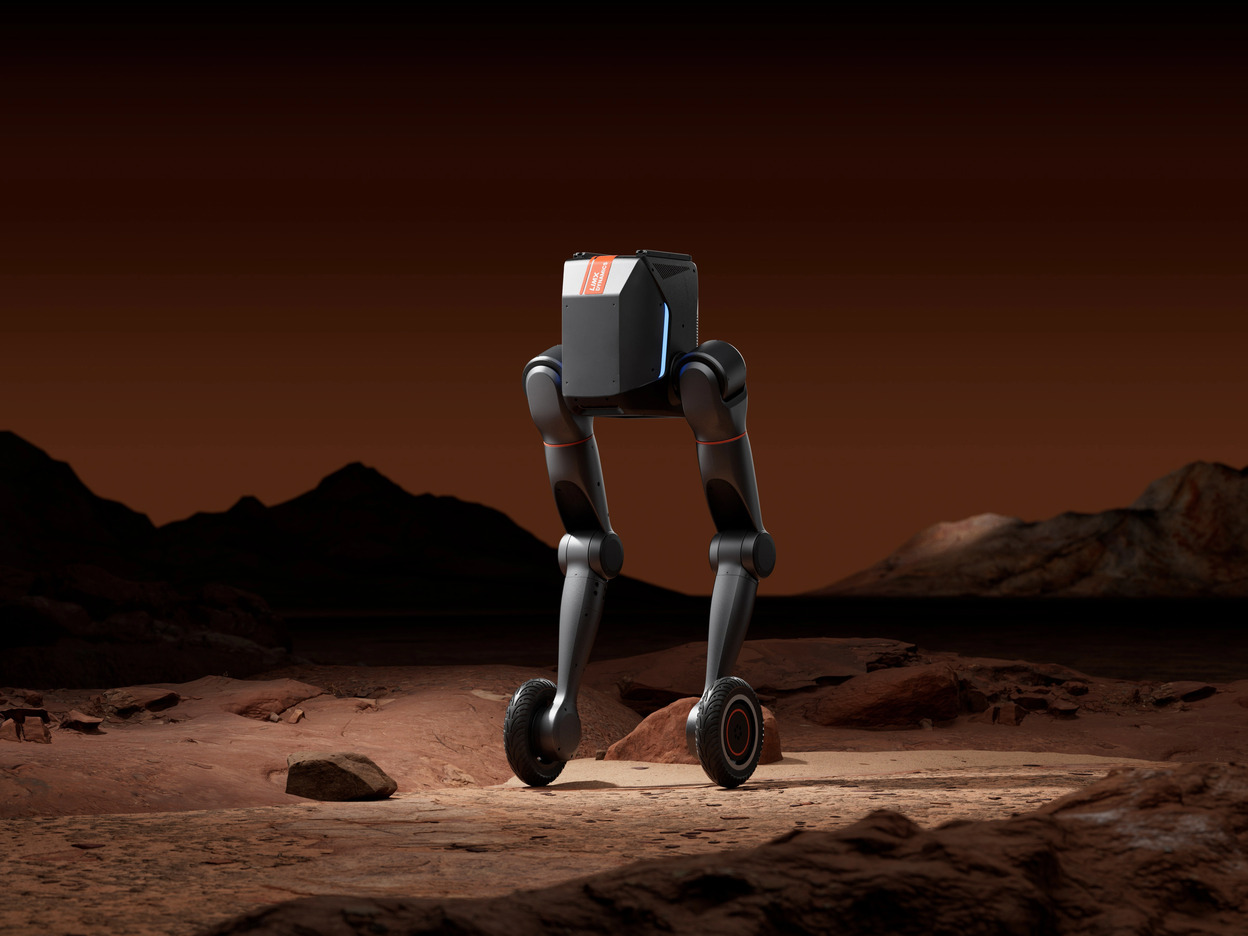
Motion Expert, Scenario Specialist.
With dual-wheeled legs supporting 30kg payloads and all-terrain mobility, plus new auto-recharging capability, TRON 2 meets diverse research and industrial needs. Backed by industry-leading hardware performance, it confidently tackles real-world complexity.

Native VLA
An All-in-One Data Acquisition and Management
Streamline the entire workflow from data collection, cleaning, and annotation to training, inference, and task management. Accelerate innovation with ease.
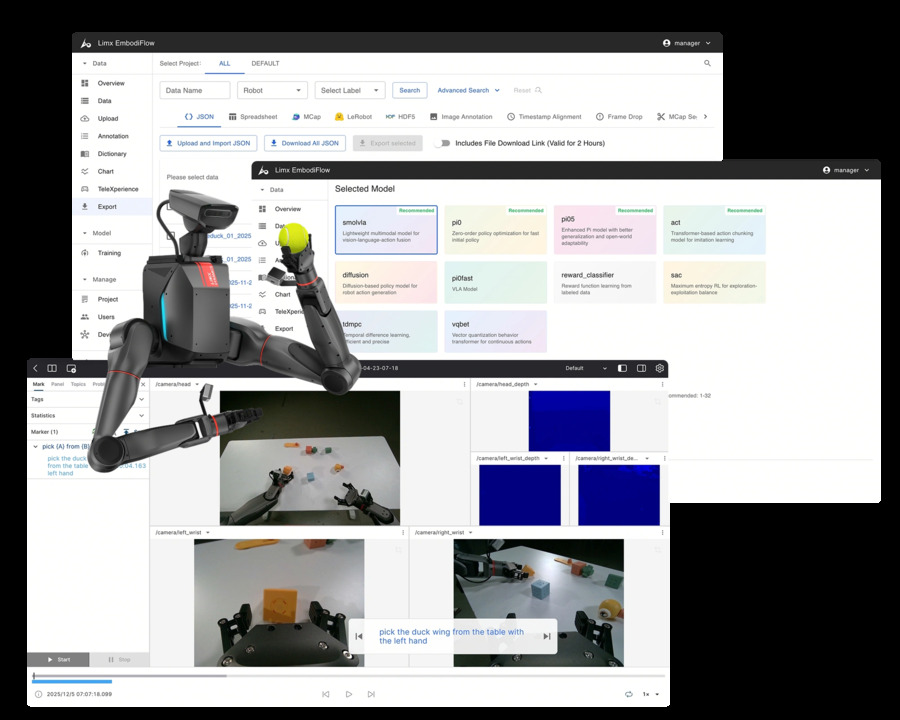
Comprehensive Tutorial Resources Master VLA in 2 Hours.
Preloaded with standard algorithm tasks for immediate use. Focus on innovation, not parameter tuning.









Lower Barriers, Smoother Development.
- Full Python development support. Compatible with ROS1 & ROS.
- Fully open SDK.
- Fully open high and low level access.
- Clear URDF for optimized Sim2Real performance.
- Pruduct manuals provided.
- Supports mainstream simulators: NVIDIA Isaac Sim, Mujoco, Gazebo, etc.
- Ongoing updates via Github.
Specifications
| Specifications | Standard | EDU |
|---|---|---|
| Mechanical Parameters | ||
| Arm Length | 700 mm | 700 mm |
| Material | Aluminum alloy + industrial plastic | Aluminum alloy + industrial plastic |
| Degree of Freedom | ||
| DoF, excl. end effector & base | 10 (bipedal), 16 (dual-arm) | 10 (bipedal), 16 (dual-arm) |
| Head DoF | 2 | 2 |
| Single Arm DoF | 7 | 7 |
| Single Leg DoF | 5 | 5 |
| Performance Parameters | ||
| Payload | 30kg (ground), 20kg (stairs), 3kg (single arm extended), 5kg (single arm peak) | 30kg (ground), 20kg (stairs), 3kg (single arm extended), 5kg (single arm peak) |
| Max Movement Speed | 3 m/s (sole), 5 m/s (wheel) | 3 m/s (sole), 5 m/s (wheel) |
| Max End-Effector Linear Velocity | 5 m/s | 5 m/s |
| Max End-Effector Acceleration | 36 m/s² | 36 m/s² |
| Repeat Positioning Accuracy | ± 0.5mm | ± 0.5mm |
| Teleoperation Delay | — | 100ms |
| Max Climbing Angle (Slope) | 15° (sole), 30° (wheel) | 15° (sole), 30° (wheel) |
| Max Obstacle Height (Step Height) | 20cm | 20cm |
| Sensor Configuration | ||
| IMU | 6-axis | 6-axis |
| Camera (Head) | Not included | RGB-D camera x1 |
| Camera (Chest) | Not included | RGB-D Camera optional |
| Camera (Wrist) | Not included | RGB-D camera x2 |
| LiDAR | Available with Sensor expansion kit | Available with Sensor expansion kit |
| Computing Specification | ||
| Basic Computing (SoC / RAM / Storage) | — | 11th Gen Intel i7 / / 2TB |
| CPU Frequency (GHz) | — | 2.8 GHz |
| Power and Battery | ||
| Battery Type | Ternary Lithium | Ternary Lithium |
| Charging Time | 30min (20-80%), 54min (20-100%) | 30min (20-80%), 54min (20-100%) |
| Battery Supply / Power Supply Rated Voltage | 46.8 V | 46.8 V |
| Battery Capacity | 9 Ah | 9 Ah |
| Max Battery Power | 2800 W | 2800 W |
| Battery Swap | Supported | Supported |
| Battery charger | 54.275V 10A | 54.275V 10A |
| Power supply method | Battery Charging | Battery Charging |
| Communication & Expansion | ||
| USB-A Port | 3.0 x1 | 3.0 x1 |
| Ethernet Port (GbE) | x1 | x1 |
| EtherCAT Port | x2 | x2 |
| RS485 Port | x1 | x1 |
| Peripheral Power Supply Port | 12V x1, 24V x1, 48V x1 | 12V x1, 24V x1, 48V x1 |
| Control & Interaction | ||
| Button | Power, Emergency Stop | Power, Emergency Stop |
| Remote Controller | Included | Included |
| Voice interaction | Available with Voice interaction kit | Available with Voice interaction kit |
| Screen / Display | Not included | Not included |
| Speaker | Not included | Not included |
| Microphone | Not included | Not included |
| Teleoperation | Not supported | VR (Oculus Quest 3) |
| Safety Features | ||
| Emergence Stop Button | Included | Included |
| Remote Emergency Stop | Included | Included |
| Dual redundant power design | Included | Included |
| Software & Development | ||
| Secondary Development | Not supported | Supported |
| High-level Motion Interface | Not supported | Supported |
| Low-level Hardware Interface | Not supported | Supported |
| System Status Interface | Supported | Supported |
| Software Upgrade (OTA) | Supported | Supported |
| Firmware upgrade | Supported | Supported |
| ROS | ROS / ROS2 | ROS / ROS2 |
| Simulator | NVIDIA Isaac Sim, MuJoCo, Gazebo | NVIDIA Isaac Sim, MuJoCo, Gazebo |
| SDK | Python, C++ | Python, C++ |
| End Effectors Included | ||
| End Effector Model | 2-finger gripper | 2-finger gripper |
| Gripping Range | 85 mm (max width) | 85 mm (max width) |
| Gripping Force | 20N | 20N |
| Other end effector integrated | Dexterous hand | Dexterous hand |

With its unique modular configuration, TRON 2 lets you freely configure Dual-arm, Bipedal, or Wheeled setups to fit your mission. Expandable with voice, vision, and more, it creates the ideal platform for building custom robotic solutions.
Read more